Последние темы
» Вити больше нет!автор bug19 Пн Фев 20 2023, 19:54
» Собираем оригинальный Орион 128
автор bug19 Пн Фев 20 2023, 19:47
» Проблема плющеного экрана ОРИОНА
автор kanzler Пн Ноя 28 2022, 12:05
» Орион 128 и его клоны возрождение 2019-2022 год
автор kanzler Пн Ноя 28 2022, 12:03
» Электроника КР-04. Информация, документы, фото.
автор kanzler Пн Ноя 28 2022, 12:02
» Новости форума
автор kanzler Пн Ноя 28 2022, 11:52
» Орион-128 НГМД запуск 2021 года
автор matrixplus Сб Сен 10 2022, 17:36
» ПЗУ F800 для РК86
автор ведущий_специалист Сб Сен 10 2022, 10:37
» Микропроцессорная лаборатория "Микролаб К580ИК80", УМК-80, УМПК-80 и др.
автор Электротехник Вт Июл 26 2022, 19:33
» Орион-128 SD карта в Орионе
автор matrixplus Чт Июн 02 2022, 09:00
» 7 Мая. День Радио!
автор Viktor2312 Чт Май 12 2022, 10:58
» Серия: Массовая радио библиотека. МРБ
автор Viktor2312 Ср Май 11 2022, 12:17
» Полезные книги
автор Viktor2312 Пн Май 09 2022, 15:07
» Орион 128 Стандарты портов и системной шины Х2
автор matrixplus Вс Май 08 2022, 23:08
» Орион-128 и Орион ПРО еще раз про блоки питания
автор matrixplus Вс Май 08 2022, 19:09
» Орион-128 Программаторы
автор matrixplus Вс Май 08 2022, 19:02
» Орион ПРО история сборки 2021 до 2022
автор matrixplus Вс Май 08 2022, 18:47
» Анонсы монет (New coin).
автор Viktor2312 Сб Май 07 2022, 23:11
» Хочу свой усилок для квартиры собрать не спеша
автор Viktor2312 Сб Май 07 2022, 19:33
» Амфитон 25у-002С
автор Viktor2312 Сб Май 07 2022, 09:38
» Майнер: T-Rex
автор Viktor2312 Вс Май 01 2022, 09:12
» GoWin. Изучение документации. SUG100-2.6E_Gowin Software User Guide. Среда разработки EDA.
автор Viktor2312 Пн Апр 25 2022, 01:01
» GoWin. Изучение документации. UG286-1.9.1E Gowin Clock User Guide.
автор Viktor2312 Сб Апр 23 2022, 18:22
» GoWin. Documentation Database. Device. GW2A.
автор Viktor2312 Ср Апр 20 2022, 14:08
» GOWIN AEC IP
автор Viktor2312 Ср Апр 20 2022, 12:08
Самые активные пользователи за месяц
| Нет пользователей |
Поиск
ARM Cortex-A8, AM335x, рассмотрение, изучение...
Страница 1 из 1 • Поделиться

 ARM Cortex-A8, AM335x, рассмотрение, изучение...
ARM Cortex-A8, AM335x, рассмотрение, изучение...
![]() Viktor2312 Вс Янв 20 2019, 10:06
Viktor2312 Вс Янв 20 2019, 10:06
1
.
____Особенностью линейки микропроцессоров AM335x семейства Sitara является архитектура с расширенным набором интегрированных аппаратных модулей, ориентированная на использование в промышленных приложениях.
Введение.
____Первые микропроцессоры семейства Sitara были разработаны TI еще в 2009г. В их структуре использовались ядра ARM9 (линейка AM17/18x), которые обеспечивали производительность до 410 MIPS, работая на частотах до 465 МГц. В 2005г. Texas Instruments приобрела первую лицензию на ARM Cortex-A8. В последующих разработках микропроцессоров Sitara стало использоваться ядро Cortex-A8, обеспечивающее бóльшую производительность при работе на более высоких частотах.
____В настоящее время семейство высокопроизводительных микропроцессоров Sitara ARM состоит более чем из 120 модификаций с ядрами ARM Cortex-A8 и ARM9 (рис. 1).

Рис. 1. Характеристики линеек микропроцессоров семейства Sitara.
____Работая на частотах от 275 МГц до 1,5 ГГц, микропроцессоры Sitara обеспечивают широкий выбор возможностей для реализации приборов в различных секторах приложений. При этом обеспечивается полная программная совместимость среди всех членов семейства — как ARM Cortex-A8, так и ARM9.
____Благодаря использованию стандартных ARM-ядер (а именно ARM9 и Cortex-A8), а также стандартного набора периферийных модулей обеспечиваются широкие возможности для переносимости программного кода в рамках семейства за счёт модульности и универсальности программных компонентов, что позволяет разработчику с минимальными трудозатратами модифицировать свои продукты.
____Старшие члены семейства Sitara — микропроцессоры линейки Am38x — обеспечивают работу на частотах до 1,5 ГГц (производительность до 3000 MIPS) и предназначены для использования в медицинских приборах, приборах и системах управления промышленной автоматики и телекоммуникационных устройствах. Операционные среды: Neutrino, Integrity, Windows Embedded CE, Linux, VXWorks, Android. Для организации пользовательского интерфейса микропроцессоры содержат средства подключения двух дисплеев высокого разрешения. AM3894 Sitara также имеет встроенный графический ускоритель трехмерной графики SGX530.
____В микропроцессорах Sitara используются два напряжения питания: 1,5/1,8 В для питания ядра и 3/3,3 В — для интегрированных периферийных устройств.
____Области применения микропроцессоров Sitara:
Особенности использования микропроцессоров в секторе промышленной автоматики.
____Производительность важна для любых современных систем, будь то бытовая техника, телекоммуникационное оборудование или приборы систем промышленной автоматики. Практика показывает, что в настоящее время не может быть «лишней» производительности, имеет смысл лишь её цена. Производительность определяется разрядностью, тактовой частотой, а также наличием определенных встроенных модулей аппаратного ускорения или поддержки специфических функций, характерных для определенных областей применения. Для промавтоматики — это необходимость работы со специфическими стандартными интерфейсами, такими как EtherCAT или PROFIBUS. Для поддержки высокой производительности по данным интерфейсам раньше требовалось применение дополнительных заказных микросхем контроллеров и определенного программного ресурса самого микропроцессора. Новая архитектура обеспечивает на аппаратно-программном уровне поддержку промышленных интерфейсов указанных стандартов, обеспечивая высокую производительность работы промышленной шины данных, освобождая микропроцессор от ряда рутинных операций.
____Члены семейства Sitara AM335x, разработанные недавно TI, имеют различные наборы встроенных модулей аппаратной функциональной поддержки, использование которых позволяет значительно повысить эффективность приборов, ориентированных на промышленный сектор.
Архитектура микропроцессоров AM335x.
____Микропроцессоры серии AM335x основаны на ядре ARM Cortex-A8, дополненном аппаратным встроенным модулем графического ускорителя для работы с 2D- и 3D-графикой, расширенными периферийными модулями, которые поддерживают опционально промышленные интерфейсы EtherCAT и PROFIBUS. Для всех микропроцессоров семейства можно использовать следующие операционные системы высокого уровня, которые компания TI предоставляет бесплатно: Linux; Windows CE; Android.
____На рис. 2 показана архитектура микропроцессоров линейки AM335x. Микропроцессор AM335x состоит из следующих базовых подсистем:

Рис. 2. Архитектура микропроцессоров линейки Sitara AM335x.
____Подсистема ускорения графики SGX реализована TI на базе ядра POWERVR SGX530 компании Imagination Technologies Ltd.
____Память адресуется в гигабитном пространстве. Частота тактирования памяти до 606 МГц (DDR3).
____Члены семейства AM335x имеют различные наборы модулей аппаратной функциональной поддержки. Это и определяет как цену микросхемы, так и ключевые сектора её применений. Опциональные модули, присутствующие в структуре только отдельных модификаций AM335x:
____Основные характеристики микропроцессоров AM335x ARM Cortex-A8:
____Далее более подробно рассмотрим структуру и работу только тех модулей, которые являются особенностью архитектуры AM335x и могут быть интересны для промышленного сектора приложений. Остальные встроенные модули являются стандартными для многих микроконтроллерных архитектур.
Дисплейный контроллер.
____Дисплейный контроллер обеспечивает интерфейсы со следующими типами дисплеев:
Контроллер сенсорной панели.
____Контроллер сенсорной панели обеспечивает поддержку «тачскринов», в которых используются различные топологии резистивных сенсорных панелей: четырёх-, пяти- и восьми- проводные. Используется в интерактивных системах с графическим интерфейсом пользователя. В секторе промышленной автоматики может применяться в терминалах и операторских панелях, а также интеллектуальных измерительных приборах.
Двухъядерный модуль системы реального времени.
____Программируемый модуль реального времени PRUSS (Programmable Real-time Unit Subsystem) является, по сути, вспомогательным процессором, позволяющим разгрузить основной процессор (хост) при работе с коммуникационными портами, выполняя простые операции протоколов обмена данными с внешними устройствами. Он состоит из двух 32‑разрядных RISC процессорных ядер PRU (Programmable Real-Time Units), имеющих свою программную память для исполняемых команд, общее ОЗУ данных, а также встроенные периферийные модули и контроллер прерываний (INTC). Программируемая структура PRU обеспечивает как доступ непосредственно к выводам портов, так и привязку к заданным событиям реального времени, обеспечивая гибкость и максимальную скорость при обслуживании периферийных интерфейсов в реальном масштабе времени. При этом используется технология энергосбережения, заключающаяся в отключении компонентов модуля при отсутствии необходимости их активности. На рис. 3 показана структура модуля PRUSS.
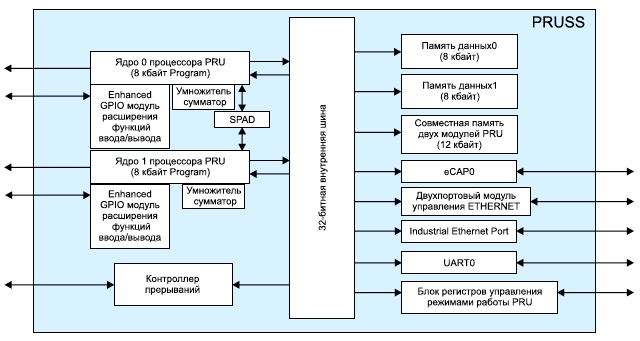
Рис. 3. Структура модуля реального времени PRUSS.
____Модуль PRUSS применялся ранее в предыдущих поколениях ARM микропроцессоров TI. В серии Sitara в линейке процессоров Am18x реализована структура нового поколения системы реального времени PRUSS (PRUSSv2). По сравнению с предыдущим поколением, представленным в линейках AM1x и OMAP-L13x, эта версия включает дополнительные возможности:
____Точно так же, как и PRU предыдущего поколения, эта система имеет доступ ко всем ресурсам основного хост-процессора системы на кристалле через шину Interface/OCP Master port. В свою очередь, хост-процессор также имеет доступ ко всем ресурсам модулей PRU. Ядра процессоров PRU программируются своей специфической системой с ограниченным набором команд. Ядра могут функционировать как совершенно независимо, так и в координации друг с другом или же с хост-процессором. Алгоритм функционирования ядер PRU определяется загружаемой в память программой при инициализации микропроцессора. Набор команд обеспечивает выполнение ряда операций, обеспечивающих значительное повышение производительности при работе с данными периферии, например портов Ethernet или UART. На UART как раз и реализуется стандарт полевой шины PROFIBUS (физический интерфейс RS-485; используется в промышленных сетях с разными протоколами, скорость обмена — до 10 Мбод).
Модуль EGP (Enhanced GPIO).
____Модуль EGP поддерживает коммутацию данных порта напрямую в ядро PRU или наоборот — из ядра PRU на выходы GPIO, запись данных в регистр ядра PRU по переднему фронту тактирующего импульса, 28‑разрядный сдвиг последовательных данных, а также режим управления MII_RT через входы портов общего назначения. Управление этими режимами производится через конфигурационные регистры CFG модуля PRUSS.
Система синхронизации портов PRUSS.
____Порт UART в PRUSS может работать с интерфейсами RS-232 или RS-485 и тактируется частотой 192 МГц, что обеспечивает высокие скорости передачи данных (10 Мбод) для интерфейса RS-485. Другие порты PRU синхронизируются частотой 200 МГц.
Контроллер прерываний (INTC).
____Важным компонентом системы реального времени является контроллер прерываний. Он обеспечивает взаимную синхронизацию передачи данных по событиям реального времени как внутри структуры PRUSS, так и при обмене данными с хост-процессором. Контроллер обрабатывает и формирует как аппаратные, так и программные прерывания от ядер PRU и хоста. Через контроллер прерываний может синхронизироваться и координироваться по событиям работа обоих ядер PRU и хоста.
____INTC обеспечивает поддержку прерываний по 64 событиям. Кроме того, от PRU формируются 16 программных прерываний от ядер PRU в хост и 10 со стороны хоста.
Почтовый ящик для внутрипроцессорных обменов данными.
____Для передачи данных или сообщений между различными асинхронно работающими устройствами микропроцессорной системы AM335x используется и механизм почтового ящика (MailBox). На рис. 4 показана структура связей почтового ящика.
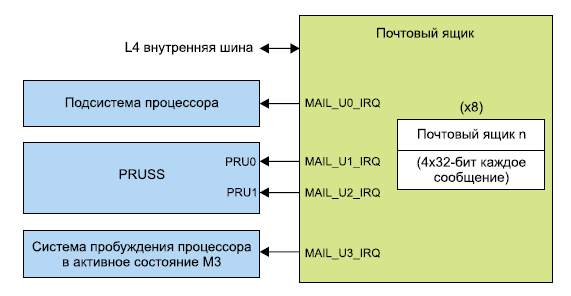
Рис. 4. Структура интерфейсов с почтовым ящиком.
____Почтовый ящик содержит восемь секций, в каждой из которых расположены четыре 32‑разрядных регистра для передачи сообщений между адресатами. Каждая секция обеспечивает передачу данных (сообщений) только в одном направлении и только между двумя адресатами. Каждая секция предварительно программируется. Задаются адреса сторон, участвующих в передаче данных. Уведомление о наличии сообщения для получателя обеспечивается через механизм прерывания. Этот механизм позволяет передавать параметры между различными независимыми процессами «на лету» без взаимного вмешательства и не требует синхронизации по тактированию. Почтовый ящик обеспечивает обмен данными между ядром процессора, периферийными устройствами и модулями процессоров реального времени.
Модуль квадратурного энкодера (Enhanced Quadrature Encoder Pulse, eQEP).
____Во многих устройствах промышленной автоматики, в частности, в робототехнике и станках с ЧПУ, в качестве датчиков угла положения, а также для измерения скорости вращения используются дисковые кодеры с массивом щелевых меток. На рис. 5 показан пример такого кодового диска.
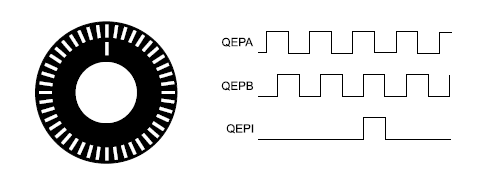
Рис. 5. Пример дискового кодера угла поворота и диаграммы сигналов с фотодатчиков.
____В структуре AM335x имеется три подобных модуля, аппаратно реализована поддержка работы с датчиком такого типа: обеспечиваются процедуры счёта импульсов и преобразования в код угла положения или скорости вращения.
Технология EtherCAT.
____EtherCAT (Ethernet for Control Automation Technology) является стандартом для промышленных Ethernet-приложений в системах реального времени, таких как: устройства ввода/вывода, датчики, программируемые логические контроллеры (PLC).
____EtherCAT расширяет возможности обычной технологии Ethernet и делает её очень эффективной для сетей автоматизации при полной совместимости с обычной Ethernet-сетью. Структура EtherCAT (рис. 6) позволяет использовать любой стандартный компьютер в качестве EtherCAT-«мастера» для связи с устройствами сети типа EtherCAT-slave, удовлетворяющими спецификации EtherCAT. Устройства master и slave EtherCAT могут применяться во всех сетевых приборах промышленной автоматизации — промышленных контроллерах, панелях оператора, удалённых терминалах и устройствах ввода/вывода, модулях датчиков, приводах и драйверах.

Рис. 6. Топология сети EtherCat.
____Усовершенствование стандартной технологии Ethernet происходит посредством реализации процессов обработки «на лету» (on-the-fly), при которой узлы сети EtherCAT могут читать данные кадров, проходящие через модуль узла. Все EtherCAT-кадры подаются из «мастера», который посылает команды и данные исполнительным (slave) узлам сети (рис. 7). А данные, которые должны быть переданы от исполнительного узла обратно «мастеру», записываются slave непосредственно в проходящий через него кадр данных. Это позволяет отказаться от использования при обмене короткими кадрами протокола «точка–точка» между ведущим и ведомыми устройствами и значительно улучшить эффективность канала обмена данными. Однако для поддержки этого в ведомом устройстве требуется реализовать два порта Ethernet, чтобы обеспечить прохождение «насквозь» кадров данных от ведущего устройства и одновременно быстрое чтение проходящего кадра и запись добавочных данных в выходной кадр, а следовательно, требуется применение специализированной аппаратной поддержки.

Рис. 7. Формат кадра EtherCAT.
____EtherCAT может работать в режиме как реального, так и недетерминированного времени. В режиме недетерминированного времени она совместима с архитектурой обычного Ethernet. А в режиме реального времени (EtherType) гарантирует доставку пакета данных, что вполне удовлетворяет требованиям промышленных сетей управления. «Мастер» сети (ведущее устройство) организует обмен данными циклично. Кадры Ethernet от «мастера» сети последовательно обходят все ведомые устройства, каждое из которых на лету находит свой адрес в кадре, считывает или вставляет данные (от 2 бит до 64 Кбайт) и отправляет кадр дальше. Процесс чтения/записи в ведомых устройствах выполняется с помощью специального контроллера EtherCAT аппаратно. Ведомые устройства в сети только выполняют команды ведущего.
Аппаратная поддержка EtherCat в A M335x.
____В модуле PRUSS реализована аппаратная поддержка интерфейса EtherCat (рис. 8 ).

Рис. 8. Реализация порта EtherCAT-slave в микропроцессоре AM335x.
____Во‑первых, организовано управление двумя физическими портами Ethernet, которые необходимы для режима EtherCat -slave. Для приёма, формирования и вставки пакетов «на лету» используются ресурсы процессоров PRU, которые должны быть запрограммированы на выполнение процедур протокола обмена.
Архитектура программной поддержки EtherCAT в A M335x.
____Поддержку реализации EtherCAT-slave в микросхемах серии AM355x обеспечивают три программных компонента. Первый — микрокод, обеспечивающий функционирование Layer 2 посредством PRU; второй — прикладной стек EtherCAT-slave, который поддерживается работой программы микропроцессора ARM; третий обеспечивает поддержку конкретного промышленного приложения и зависит от вида оконечного оборудования. Есть также и дополнительные компоненты, например такие, как протокол уровня адаптации, а также драйверы устройства, которые поставляются TI в составе ПО отладочного набора. На рис. 9 показана структура программной поддержки EtherCat в AM335x.
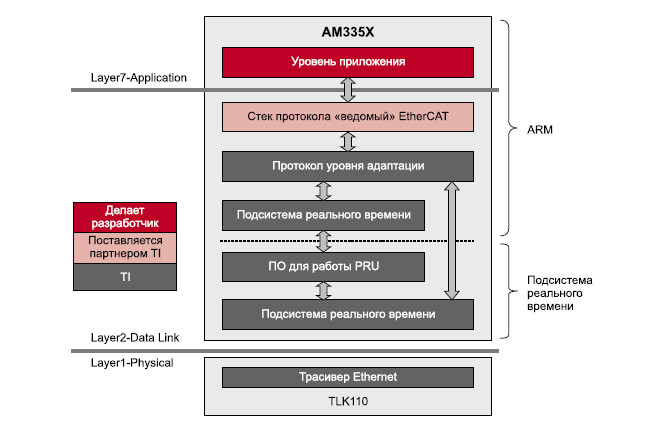
Рис. 9. Структура программной поддержки EtherCat , реализованной в AM335x.
PROFIBUS.
____PROFIBUS (PROcess FIeld BUS) — открытая промышленная сеть, использующая обмен данными между ведущим и ведомыми устройствами. Она позволяет объединять разрозненные устройства автоматизации на уровне датчиков и приводов в единую систему. Шина PROFIBUS (рис. 10) используется для соединений контроллеров с удаленными модулями ввода/вывода, датчиками, актуаторами, а также другими компонентами сети. Физический уровень шины — интерфейс RS-485.
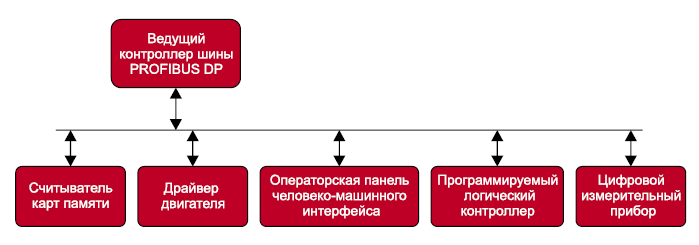
Рис. 10. Топология шины PROFIBUS DP Master.
____Для реализации протокола фактически используется UART-интерфейс микропроцессора и определенная программная поддержка (формирование кадров сообщений, приём сообщений, валидация и т. п.). Чтобы разгрузить хост-процессор от обязанности заниматься обслуживанием протокола, до настоящего времени использовались вспомогательные микросхемы, реализованные на ПЛМ или ПЛИС.
Поддержка шины PROFIBUS от Texas Instruments.
____TI обеспечивает работу протокола шины PROFIBUS в поколениях микропроцессоров Sitara AM1810 ARM9 и AM335x ARM Cortex-A8 (рис. 11). Порты микропроцессоров подключаются непосредственно к трансиверам интерфейсов RS-485, поэтому дополнительных заказных микросхем ПЛМ или ПЛИС не требуется.
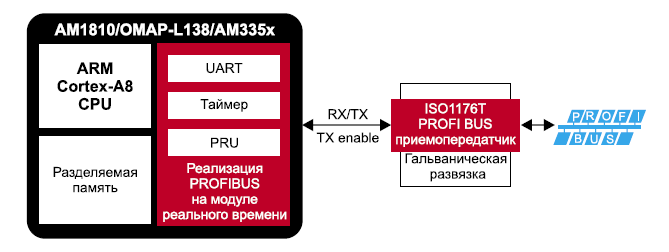
Рис. 11. Поддержка шины PROFIBUS в структуре микропроцессоров Sitara.
____Формирователь кадра для шины PROFIBUS в реальном времени (Fieldbus Data Link, FDL) инкапсулирован в подсистеме программируемого модуля реального времени (PRU). В линейке Sitara AM335x ARM Cortex-A8 используется модуль PRU второго поколения, который обеспечивает поддержку стандарта промышленного Ethernet в дополнение к поддержке шины PROFIBUS. Работа модуля PRU обеспечивает передачу и приём кадров сообщений протокола PROFIBUS, проверку кадров и приём/передачу сообщений к процессору ARM и от него. Для коммуникации между PRU и хостом используется память данных c общим доступом (Shared Memory).
Типы и особенности корпусов.
____Микросхемы линейки AM335x поставляются в пластиковых BGA-корпусах двух типов: ZCE и ZCZ. Корпус ZCZ размером 15,1 х 15,1 мм имеет 324 вывода. Высота корпуса при монтаже всего 1,4 мм, шаг шариков 0,8 мм. Корпус используется для модификаций процессоров с расширенным числом портов ввода/вывода.
____Корпус ZCE — 298‑выводной пластиковый BGA (NFBGA). Он имеет меньшие габариты: 13,1 х 13,1 х 1,3 мм. Шаг шариков 0,65 мм. Более компактный корпус предназначен для исполнений, в которых не требуется расширенное число портов и более важно место на плате. Для упрощения разводки сигнальных цепей на печатной плате в этом корпусе применена специальная топология выводных шариков Via Channel (рис. 12).

Рис. 12. Топология размещения шариков для корпуса ZCE.
____Наличие распределённых пустых зон внутри матрицы выводов обеспечивает возможность разместить переходные отверстия в печатной плате и тем самым упростить разводку соединений. Для разводки сигнальных проводников достаточно всего два слоя металлизации (при общем числе слоев 4).
Модификации линейки AM335x и система обозначений.
____Имеются различные по производительности и по цене модификации микропроцессоров. Частота работы процессорного ядра задаётся в суффиксе названия при заказе (рис. 13). Есть три исполнения для температурного диапазона:

Рис. 13. Система обозначений при заказе микросхем семейства AM335x.
____Тут следует добавить, что на данный момент в диапазоне скорости уже имеется и микросхема микропроцессора с значением 100, то есть процессор рассчитан на работу с тактовой частотой 1 ГГц.
____Компания TI использует гибкую ценовую политику для оптимизации выбора нужной конфигурации микропроцессора из линейки AM335x (табл. 1). Цена микросхем линейки разная и зависит от диапазона рабочих частот процессора и наличия активных встроенных модулей:
Sitara AM335x — линейка микропроцессоров с ядром Cortex-A8.
____Особенностью линейки микропроцессоров AM335x семейства Sitara является архитектура с расширенным набором интегрированных аппаратных модулей, ориентированная на использование в промышленных приложениях.
Введение.
____Первые микропроцессоры семейства Sitara были разработаны TI еще в 2009г. В их структуре использовались ядра ARM9 (линейка AM17/18x), которые обеспечивали производительность до 410 MIPS, работая на частотах до 465 МГц. В 2005г. Texas Instruments приобрела первую лицензию на ARM Cortex-A8. В последующих разработках микропроцессоров Sitara стало использоваться ядро Cortex-A8, обеспечивающее бóльшую производительность при работе на более высоких частотах.
____В настоящее время семейство высокопроизводительных микропроцессоров Sitara ARM состоит более чем из 120 модификаций с ядрами ARM Cortex-A8 и ARM9 (рис. 1).

Рис. 1. Характеристики линеек микропроцессоров семейства Sitara.
____Работая на частотах от 275 МГц до 1,5 ГГц, микропроцессоры Sitara обеспечивают широкий выбор возможностей для реализации приборов в различных секторах приложений. При этом обеспечивается полная программная совместимость среди всех членов семейства — как ARM Cortex-A8, так и ARM9.
____Благодаря использованию стандартных ARM-ядер (а именно ARM9 и Cortex-A8), а также стандартного набора периферийных модулей обеспечиваются широкие возможности для переносимости программного кода в рамках семейства за счёт модульности и универсальности программных компонентов, что позволяет разработчику с минимальными трудозатратами модифицировать свои продукты.
____Старшие члены семейства Sitara — микропроцессоры линейки Am38x — обеспечивают работу на частотах до 1,5 ГГц (производительность до 3000 MIPS) и предназначены для использования в медицинских приборах, приборах и системах управления промышленной автоматики и телекоммуникационных устройствах. Операционные среды: Neutrino, Integrity, Windows Embedded CE, Linux, VXWorks, Android. Для организации пользовательского интерфейса микропроцессоры содержат средства подключения двух дисплеев высокого разрешения. AM3894 Sitara также имеет встроенный графический ускоритель трехмерной графики SGX530.
____В микропроцессорах Sitara используются два напряжения питания: 1,5/1,8 В для питания ядра и 3/3,3 В — для интегрированных периферийных устройств.
____Области применения микропроцессоров Sitara:
- портативные терминалы обслуживания клиентов;
- одноплатные компьютеры;
- специализированные пользовательские интерфейсы;
- медицинские приборы;
- портативные приборы с малым энергопотреблением;
- навигационные приборы;
- автоматика для зданий и жилых помещений;
- «умные» дисплеи;
- игровые приставки.
Особенности использования микропроцессоров в секторе промышленной автоматики.
____Производительность важна для любых современных систем, будь то бытовая техника, телекоммуникационное оборудование или приборы систем промышленной автоматики. Практика показывает, что в настоящее время не может быть «лишней» производительности, имеет смысл лишь её цена. Производительность определяется разрядностью, тактовой частотой, а также наличием определенных встроенных модулей аппаратного ускорения или поддержки специфических функций, характерных для определенных областей применения. Для промавтоматики — это необходимость работы со специфическими стандартными интерфейсами, такими как EtherCAT или PROFIBUS. Для поддержки высокой производительности по данным интерфейсам раньше требовалось применение дополнительных заказных микросхем контроллеров и определенного программного ресурса самого микропроцессора. Новая архитектура обеспечивает на аппаратно-программном уровне поддержку промышленных интерфейсов указанных стандартов, обеспечивая высокую производительность работы промышленной шины данных, освобождая микропроцессор от ряда рутинных операций.
____Члены семейства Sitara AM335x, разработанные недавно TI, имеют различные наборы встроенных модулей аппаратной функциональной поддержки, использование которых позволяет значительно повысить эффективность приборов, ориентированных на промышленный сектор.
Архитектура микропроцессоров AM335x.
____Микропроцессоры серии AM335x основаны на ядре ARM Cortex-A8, дополненном аппаратным встроенным модулем графического ускорителя для работы с 2D- и 3D-графикой, расширенными периферийными модулями, которые поддерживают опционально промышленные интерфейсы EtherCAT и PROFIBUS. Для всех микропроцессоров семейства можно использовать следующие операционные системы высокого уровня, которые компания TI предоставляет бесплатно: Linux; Windows CE; Android.
____На рис. 2 показана архитектура микропроцессоров линейки AM335x. Микропроцессор AM335x состоит из следующих базовых подсистем:
- микропроцессорный блок (MPU), основанный на ядре ARM Cortex-A8 с блоками программной памяти и ОЗУ;
- коммуникационные последовательные порты;
- системные модули (часы реального времени, сторожевые таймеры, управление питанием, встроенные АЦП, отладочный интерфейс и т. д.);
- интерфейс памяти (DDR/DDR2, NAND/NOR, MMC/CD/SDIO);
- двухпортовый коммутатор Gigabit Ethernet;
- криптопроцессор;
- графический ускоритель SGX для ускорения операций 3D-графики, дисплейных функций и игровых эффектов;
- общая разделяемая память ОЗУ;
- дисплейный контроллер;
- контроллер сенсорной панели;
- программируемый модуль реального времени PRUSS (Programmable Real-Time Unit Subsystem);
- система внутренних шин (Interconnect).

Рис. 2. Архитектура микропроцессоров линейки Sitara AM335x.
____Подсистема ускорения графики SGX реализована TI на базе ядра POWERVR SGX530 компании Imagination Technologies Ltd.
____Память адресуется в гигабитном пространстве. Частота тактирования памяти до 606 МГц (DDR3).
____Члены семейства AM335x имеют различные наборы модулей аппаратной функциональной поддержки. Это и определяет как цену микросхемы, так и ключевые сектора её применений. Опциональные модули, присутствующие в структуре только отдельных модификаций AM335x:
- графический ускоритель;
- программируемый модуль ускорения процессов обработки в реальном времени.
____Основные характеристики микропроцессоров AM335x ARM Cortex-A8:
- Ядро ARM Cortex-A8 с тактовой частотой до 720 МГц с поддержкой операционных систем высокого уровня, включая Linux и Android, а также многочисленных рабочих режимов энергопотребления и производительности.
- Интегрированные широкополосные коммуникационные периферийные устройства (интерфейсы USB 2.0 с поддержкой PHY, двухпортовый коммутатор Gigabit Ethernet, CAN, PRU, поддержка шифрования данных Crypto, производительные интерфейсы с памятью LPDDR1/DDR2/DDR3), обеспечивающие адаптируемость устройств и быструю передачу данных.
- Интегрированный контроллер трехмерной графики и сенсорного экрана, обеспечивающий возможность работы с современными графическими интерфейсами пользователя и интерфейсами сенсорного экрана.
____Далее более подробно рассмотрим структуру и работу только тех модулей, которые являются особенностью архитектуры AM335x и могут быть интересны для промышленного сектора приложений. Остальные встроенные модули являются стандартными для многих микроконтроллерных архитектур.
Дисплейный контроллер.
____Дисплейный контроллер обеспечивает интерфейсы со следующими типами дисплеев:
- символьными;
- пассивными матричными ЖК;
- ЖК-дисплеями с активной адресацией с разрешением до WXGA (1366 х 768).
Контроллер сенсорной панели.
____Контроллер сенсорной панели обеспечивает поддержку «тачскринов», в которых используются различные топологии резистивных сенсорных панелей: четырёх-, пяти- и восьми- проводные. Используется в интерактивных системах с графическим интерфейсом пользователя. В секторе промышленной автоматики может применяться в терминалах и операторских панелях, а также интеллектуальных измерительных приборах.
Двухъядерный модуль системы реального времени.
____Программируемый модуль реального времени PRUSS (Programmable Real-time Unit Subsystem) является, по сути, вспомогательным процессором, позволяющим разгрузить основной процессор (хост) при работе с коммуникационными портами, выполняя простые операции протоколов обмена данными с внешними устройствами. Он состоит из двух 32‑разрядных RISC процессорных ядер PRU (Programmable Real-Time Units), имеющих свою программную память для исполняемых команд, общее ОЗУ данных, а также встроенные периферийные модули и контроллер прерываний (INTC). Программируемая структура PRU обеспечивает как доступ непосредственно к выводам портов, так и привязку к заданным событиям реального времени, обеспечивая гибкость и максимальную скорость при обслуживании периферийных интерфейсов в реальном масштабе времени. При этом используется технология энергосбережения, заключающаяся в отключении компонентов модуля при отсутствии необходимости их активности. На рис. 3 показана структура модуля PRUSS.

Рис. 3. Структура модуля реального времени PRUSS.
____Модуль PRUSS применялся ранее в предыдущих поколениях ARM микропроцессоров TI. В серии Sitara в линейке процессоров Am18x реализована структура нового поколения системы реального времени PRUSS (PRUSSv2). По сравнению с предыдущим поколением, представленным в линейках AM1x и OMAP-L13x, эта версия включает дополнительные возможности:
- больший объём памяти данных ОЗУ (8 кбайт вместо 512 байт) и памяти команд (8 кбайт вместо 4 кбайт);
- 12 Кбайт RAM с общим доступом;
- расширенные порты ввода/вывода (EGPIO), обеспечивающие поддержку последовательных, параллельных интерфейсов;
- система пинов, относящихся к модулю PRU;
- сверхоперативная память (SPAD), общая для двух ядер PRU (тридцать 32‑разрядных регистров);
- модуль аппаратного умножителя с сумматором (MAC);
- собственные периферийные модули (UART, eCAP, MII_RT, MDIO, и IEP).
____Точно так же, как и PRU предыдущего поколения, эта система имеет доступ ко всем ресурсам основного хост-процессора системы на кристалле через шину Interface/OCP Master port. В свою очередь, хост-процессор также имеет доступ ко всем ресурсам модулей PRU. Ядра процессоров PRU программируются своей специфической системой с ограниченным набором команд. Ядра могут функционировать как совершенно независимо, так и в координации друг с другом или же с хост-процессором. Алгоритм функционирования ядер PRU определяется загружаемой в память программой при инициализации микропроцессора. Набор команд обеспечивает выполнение ряда операций, обеспечивающих значительное повышение производительности при работе с данными периферии, например портов Ethernet или UART. На UART как раз и реализуется стандарт полевой шины PROFIBUS (физический интерфейс RS-485; используется в промышленных сетях с разными протоколами, скорость обмена — до 10 Мбод).
Модуль EGP (Enhanced GPIO).
____Модуль EGP поддерживает коммутацию данных порта напрямую в ядро PRU или наоборот — из ядра PRU на выходы GPIO, запись данных в регистр ядра PRU по переднему фронту тактирующего импульса, 28‑разрядный сдвиг последовательных данных, а также режим управления MII_RT через входы портов общего назначения. Управление этими режимами производится через конфигурационные регистры CFG модуля PRUSS.
Система синхронизации портов PRUSS.
____Порт UART в PRUSS может работать с интерфейсами RS-232 или RS-485 и тактируется частотой 192 МГц, что обеспечивает высокие скорости передачи данных (10 Мбод) для интерфейса RS-485. Другие порты PRU синхронизируются частотой 200 МГц.
Контроллер прерываний (INTC).
____Важным компонентом системы реального времени является контроллер прерываний. Он обеспечивает взаимную синхронизацию передачи данных по событиям реального времени как внутри структуры PRUSS, так и при обмене данными с хост-процессором. Контроллер обрабатывает и формирует как аппаратные, так и программные прерывания от ядер PRU и хоста. Через контроллер прерываний может синхронизироваться и координироваться по событиям работа обоих ядер PRU и хоста.
____INTC обеспечивает поддержку прерываний по 64 событиям. Кроме того, от PRU формируются 16 программных прерываний от ядер PRU в хост и 10 со стороны хоста.
Почтовый ящик для внутрипроцессорных обменов данными.
____Для передачи данных или сообщений между различными асинхронно работающими устройствами микропроцессорной системы AM335x используется и механизм почтового ящика (MailBox). На рис. 4 показана структура связей почтового ящика.

Рис. 4. Структура интерфейсов с почтовым ящиком.
____Почтовый ящик содержит восемь секций, в каждой из которых расположены четыре 32‑разрядных регистра для передачи сообщений между адресатами. Каждая секция обеспечивает передачу данных (сообщений) только в одном направлении и только между двумя адресатами. Каждая секция предварительно программируется. Задаются адреса сторон, участвующих в передаче данных. Уведомление о наличии сообщения для получателя обеспечивается через механизм прерывания. Этот механизм позволяет передавать параметры между различными независимыми процессами «на лету» без взаимного вмешательства и не требует синхронизации по тактированию. Почтовый ящик обеспечивает обмен данными между ядром процессора, периферийными устройствами и модулями процессоров реального времени.
Модуль квадратурного энкодера (Enhanced Quadrature Encoder Pulse, eQEP).
____Во многих устройствах промышленной автоматики, в частности, в робототехнике и станках с ЧПУ, в качестве датчиков угла положения, а также для измерения скорости вращения используются дисковые кодеры с массивом щелевых меток. На рис. 5 показан пример такого кодового диска.

Рис. 5. Пример дискового кодера угла поворота и диаграммы сигналов с фотодатчиков.
____В структуре AM335x имеется три подобных модуля, аппаратно реализована поддержка работы с датчиком такого типа: обеспечиваются процедуры счёта импульсов и преобразования в код угла положения или скорости вращения.
Технология EtherCAT.
____EtherCAT (Ethernet for Control Automation Technology) является стандартом для промышленных Ethernet-приложений в системах реального времени, таких как: устройства ввода/вывода, датчики, программируемые логические контроллеры (PLC).
____EtherCAT расширяет возможности обычной технологии Ethernet и делает её очень эффективной для сетей автоматизации при полной совместимости с обычной Ethernet-сетью. Структура EtherCAT (рис. 6) позволяет использовать любой стандартный компьютер в качестве EtherCAT-«мастера» для связи с устройствами сети типа EtherCAT-slave, удовлетворяющими спецификации EtherCAT. Устройства master и slave EtherCAT могут применяться во всех сетевых приборах промышленной автоматизации — промышленных контроллерах, панелях оператора, удалённых терминалах и устройствах ввода/вывода, модулях датчиков, приводах и драйверах.

Рис. 6. Топология сети EtherCat.
____Усовершенствование стандартной технологии Ethernet происходит посредством реализации процессов обработки «на лету» (on-the-fly), при которой узлы сети EtherCAT могут читать данные кадров, проходящие через модуль узла. Все EtherCAT-кадры подаются из «мастера», который посылает команды и данные исполнительным (slave) узлам сети (рис. 7). А данные, которые должны быть переданы от исполнительного узла обратно «мастеру», записываются slave непосредственно в проходящий через него кадр данных. Это позволяет отказаться от использования при обмене короткими кадрами протокола «точка–точка» между ведущим и ведомыми устройствами и значительно улучшить эффективность канала обмена данными. Однако для поддержки этого в ведомом устройстве требуется реализовать два порта Ethernet, чтобы обеспечить прохождение «насквозь» кадров данных от ведущего устройства и одновременно быстрое чтение проходящего кадра и запись добавочных данных в выходной кадр, а следовательно, требуется применение специализированной аппаратной поддержки.

Рис. 7. Формат кадра EtherCAT.
____EtherCAT может работать в режиме как реального, так и недетерминированного времени. В режиме недетерминированного времени она совместима с архитектурой обычного Ethernet. А в режиме реального времени (EtherType) гарантирует доставку пакета данных, что вполне удовлетворяет требованиям промышленных сетей управления. «Мастер» сети (ведущее устройство) организует обмен данными циклично. Кадры Ethernet от «мастера» сети последовательно обходят все ведомые устройства, каждое из которых на лету находит свой адрес в кадре, считывает или вставляет данные (от 2 бит до 64 Кбайт) и отправляет кадр дальше. Процесс чтения/записи в ведомых устройствах выполняется с помощью специального контроллера EtherCAT аппаратно. Ведомые устройства в сети только выполняют команды ведущего.
Аппаратная поддержка EtherCat в A M335x.
____В модуле PRUSS реализована аппаратная поддержка интерфейса EtherCat (рис. 8 ).

Рис. 8. Реализация порта EtherCAT-slave в микропроцессоре AM335x.
____Во‑первых, организовано управление двумя физическими портами Ethernet, которые необходимы для режима EtherCat -slave. Для приёма, формирования и вставки пакетов «на лету» используются ресурсы процессоров PRU, которые должны быть запрограммированы на выполнение процедур протокола обмена.
Архитектура программной поддержки EtherCAT в A M335x.
____Поддержку реализации EtherCAT-slave в микросхемах серии AM355x обеспечивают три программных компонента. Первый — микрокод, обеспечивающий функционирование Layer 2 посредством PRU; второй — прикладной стек EtherCAT-slave, который поддерживается работой программы микропроцессора ARM; третий обеспечивает поддержку конкретного промышленного приложения и зависит от вида оконечного оборудования. Есть также и дополнительные компоненты, например такие, как протокол уровня адаптации, а также драйверы устройства, которые поставляются TI в составе ПО отладочного набора. На рис. 9 показана структура программной поддержки EtherCat в AM335x.

Рис. 9. Структура программной поддержки EtherCat , реализованной в AM335x.
PROFIBUS.
____PROFIBUS (PROcess FIeld BUS) — открытая промышленная сеть, использующая обмен данными между ведущим и ведомыми устройствами. Она позволяет объединять разрозненные устройства автоматизации на уровне датчиков и приводов в единую систему. Шина PROFIBUS (рис. 10) используется для соединений контроллеров с удаленными модулями ввода/вывода, датчиками, актуаторами, а также другими компонентами сети. Физический уровень шины — интерфейс RS-485.

Рис. 10. Топология шины PROFIBUS DP Master.
____Для реализации протокола фактически используется UART-интерфейс микропроцессора и определенная программная поддержка (формирование кадров сообщений, приём сообщений, валидация и т. п.). Чтобы разгрузить хост-процессор от обязанности заниматься обслуживанием протокола, до настоящего времени использовались вспомогательные микросхемы, реализованные на ПЛМ или ПЛИС.
Поддержка шины PROFIBUS от Texas Instruments.
____TI обеспечивает работу протокола шины PROFIBUS в поколениях микропроцессоров Sitara AM1810 ARM9 и AM335x ARM Cortex-A8 (рис. 11). Порты микропроцессоров подключаются непосредственно к трансиверам интерфейсов RS-485, поэтому дополнительных заказных микросхем ПЛМ или ПЛИС не требуется.

Рис. 11. Поддержка шины PROFIBUS в структуре микропроцессоров Sitara.
____Формирователь кадра для шины PROFIBUS в реальном времени (Fieldbus Data Link, FDL) инкапсулирован в подсистеме программируемого модуля реального времени (PRU). В линейке Sitara AM335x ARM Cortex-A8 используется модуль PRU второго поколения, который обеспечивает поддержку стандарта промышленного Ethernet в дополнение к поддержке шины PROFIBUS. Работа модуля PRU обеспечивает передачу и приём кадров сообщений протокола PROFIBUS, проверку кадров и приём/передачу сообщений к процессору ARM и от него. Для коммуникации между PRU и хостом используется память данных c общим доступом (Shared Memory).
Типы и особенности корпусов.
____Микросхемы линейки AM335x поставляются в пластиковых BGA-корпусах двух типов: ZCE и ZCZ. Корпус ZCZ размером 15,1 х 15,1 мм имеет 324 вывода. Высота корпуса при монтаже всего 1,4 мм, шаг шариков 0,8 мм. Корпус используется для модификаций процессоров с расширенным числом портов ввода/вывода.
____Корпус ZCE — 298‑выводной пластиковый BGA (NFBGA). Он имеет меньшие габариты: 13,1 х 13,1 х 1,3 мм. Шаг шариков 0,65 мм. Более компактный корпус предназначен для исполнений, в которых не требуется расширенное число портов и более важно место на плате. Для упрощения разводки сигнальных цепей на печатной плате в этом корпусе применена специальная топология выводных шариков Via Channel (рис. 12).

Рис. 12. Топология размещения шариков для корпуса ZCE.
____Наличие распределённых пустых зон внутри матрицы выводов обеспечивает возможность разместить переходные отверстия в печатной плате и тем самым упростить разводку соединений. Для разводки сигнальных проводников достаточно всего два слоя металлизации (при общем числе слоев 4).
Модификации линейки AM335x и система обозначений.
____Имеются различные по производительности и по цене модификации микропроцессоров. Частота работы процессорного ядра задаётся в суффиксе названия при заказе (рис. 13). Есть три исполнения для температурного диапазона:
- без буквы — коммерческий (0…+90 °С);
- D — индустриальный (–40…+90 °C);
- A — расширенный (–40…+105 °C).

Рис. 13. Система обозначений при заказе микросхем семейства AM335x.
____Тут следует добавить, что на данный момент в диапазоне скорости уже имеется и микросхема микропроцессора с значением 100, то есть процессор рассчитан на работу с тактовой частотой 1 ГГц.
____Компания TI использует гибкую ценовую политику для оптимизации выбора нужной конфигурации микропроцессора из линейки AM335x (табл. 1). Цена микросхем линейки разная и зависит от диапазона рабочих частот процессора и наличия активных встроенных модулей:
- графического ускорителя;
- модуля PRU;
- поддержки PRU интерфейса EtherCat .
Viktor2312- RIP
- Сообщения : 15492
Дата регистрации : 2012-08-10
Возраст : 45
Откуда : Пятигорск


 Похожие темы
Похожие темы» STM32F4. Изучение.
» GoWin. Изучение. Разное...
» Ковыряшки, изучение, осмысление, ссылки...
» PIC16 - микроконтроллеры, изучение, и всё что с ними связано
» PIC24 - микроконтроллеры, изучение, и всё что с ними связано
» GoWin. Изучение. Разное...
» Ковыряшки, изучение, осмысление, ссылки...
» PIC16 - микроконтроллеры, изучение, и всё что с ними связано
» PIC24 - микроконтроллеры, изучение, и всё что с ними связано
Страница 1 из 1
Права доступа к этому форуму:
Вы не можете отвечать на сообщения